DJI Matrice300RTK + RIEGL miniVUX-3UAV 検証レビュー!
ブログ 投稿日:
今、話題のDJI社 Matrice300RTKにRIEGL社レーザースキャナ miniVUX-3UAVを搭載し実地検証を行いました!
結果は良好でした! 詳しくは以下をご確認いただき、ご参考にされてください。
(検証の詳細や製品などについてお知りになりたい場合はお問い合わせください)
※フィールド提供 : 株式会社 NSi真岡
■検証にあたり
最近、各社でこの組み合わせのシステムが話題となっていますが、なかなか実地検証の情報が見えてきません。
ドローン(プラットフォーム)、レーザースキャナシステム(ペイロード)それぞれの機器のメーカースペックは明示・開示されています。
一見すると、それらの理論値だけで総合的な性能を推測し、業務利用における採否を判断できそうですが、
細かくは、採用されているGNSS/IMUの違い、そのレーバーアーム値(概略:LS/GNSS/IMUの相対的配置)の違い、
また、ドローンへの取り付け方・防振ギミック等の違いなどなど、実は細部で各社の違いがあり、これらは精度に影響を及ぼします。
(補足:そのため地理院マニュアル案ではボアサイトキャリブレーションにより定期点検し、適用業務における要求事項を満たすか事前確認するようガイドラインしているわけです)。
様々な目的・要求の業務に、様々なシステムを用いて対応するためにも、
やはり、実地で性能評価することが極めて重要であり、それを地理院が求める項目において証明することが必要なのだと思います。
金井度量衡株式会社・Geometrix Enterprise
吉田雄一(写真測量学会認定講師) 拝
■使用機器
・ドローン : DJI Matrice 300 RTK
・レーザースキャナ : RIEGL miniVUX-3UAV
・ソフトウェア : Applanix POSPac UAV 、 RIEGL RiPROCESS

■検証概要
・精度検証:飛行高度別 ボアサイトキャリブレーション
ボアサイトキャリブレーション:【UAVレーザ測量マニュアル改正案】_補足資料_CAL手法
・飛行時間検証:自動飛行ルートのループ設定による、安全運航限界の確認
■飛行諸元
・精度検証①
高度 : 100m
速度 : 3m/s
点密度: Min 80pts/㎡ 、 Avg 125pts/㎡ 、 Max 159pts/㎡
・精度検証②
高度 : 140m
速度 : 3m/s
点密度: Min 57pts/㎡ 、 Avg 90pts/㎡ 、 Max 115pts/㎡
※点密度は1回飛行の場合。実際の点群は重複がある。
※飛行高度のみの変更のため、ルートの条件は共通。
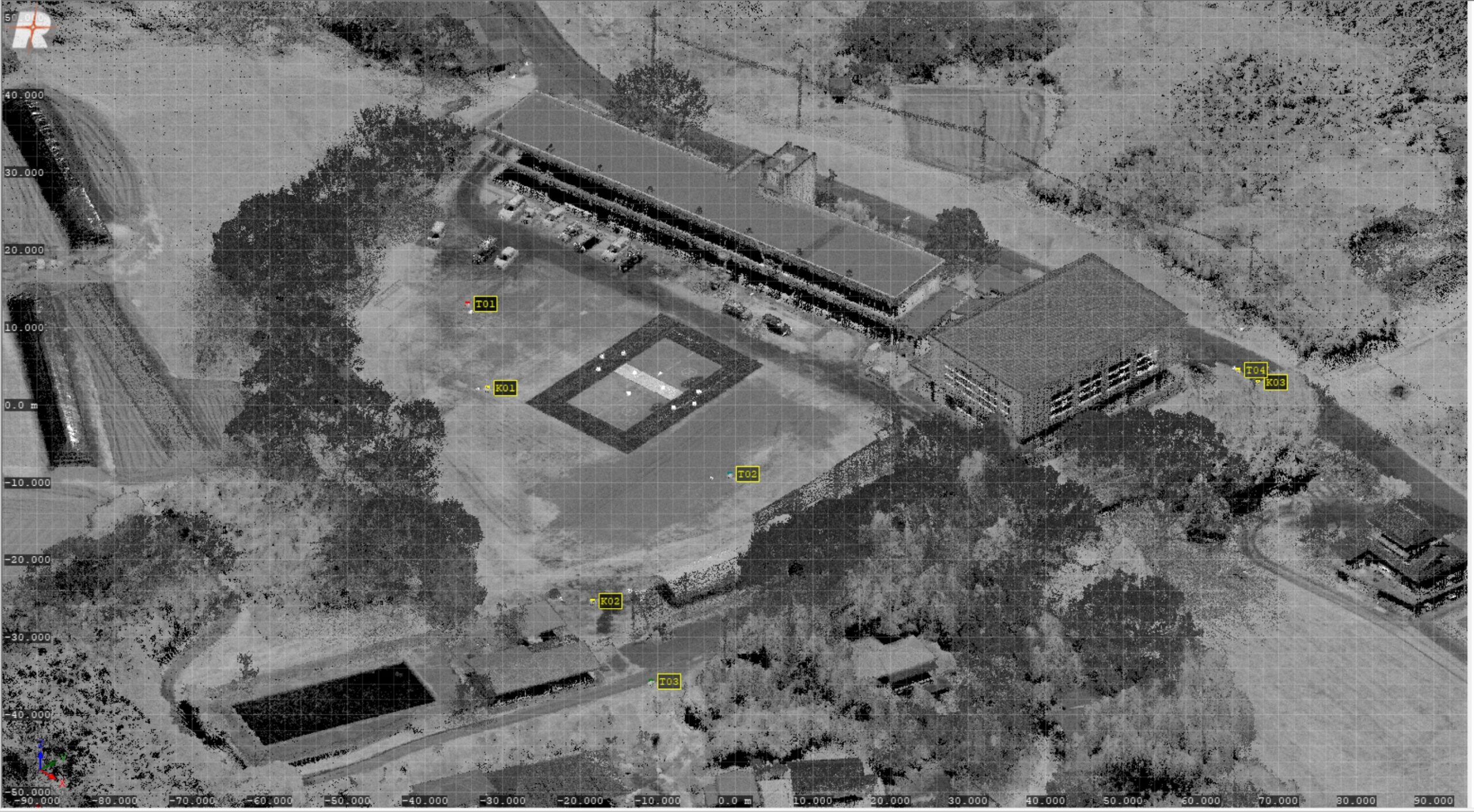
・対空標識設置箇所、飛行ルート
▲:調整用基準点 ●:検証点

・飛行時間検証①
高度 : 100m
速度 : 3m/s
・飛行時間検証②
高度 : 100m
速度 : 5m/s
・条件(①②共通)
・1コース3~5分のルートを飛行
・機体のバッテリーが30%の警告が出るまでルートを繰り返し飛行させる
・終了したら着陸し、それまでの時間を記録する
・飛行ルート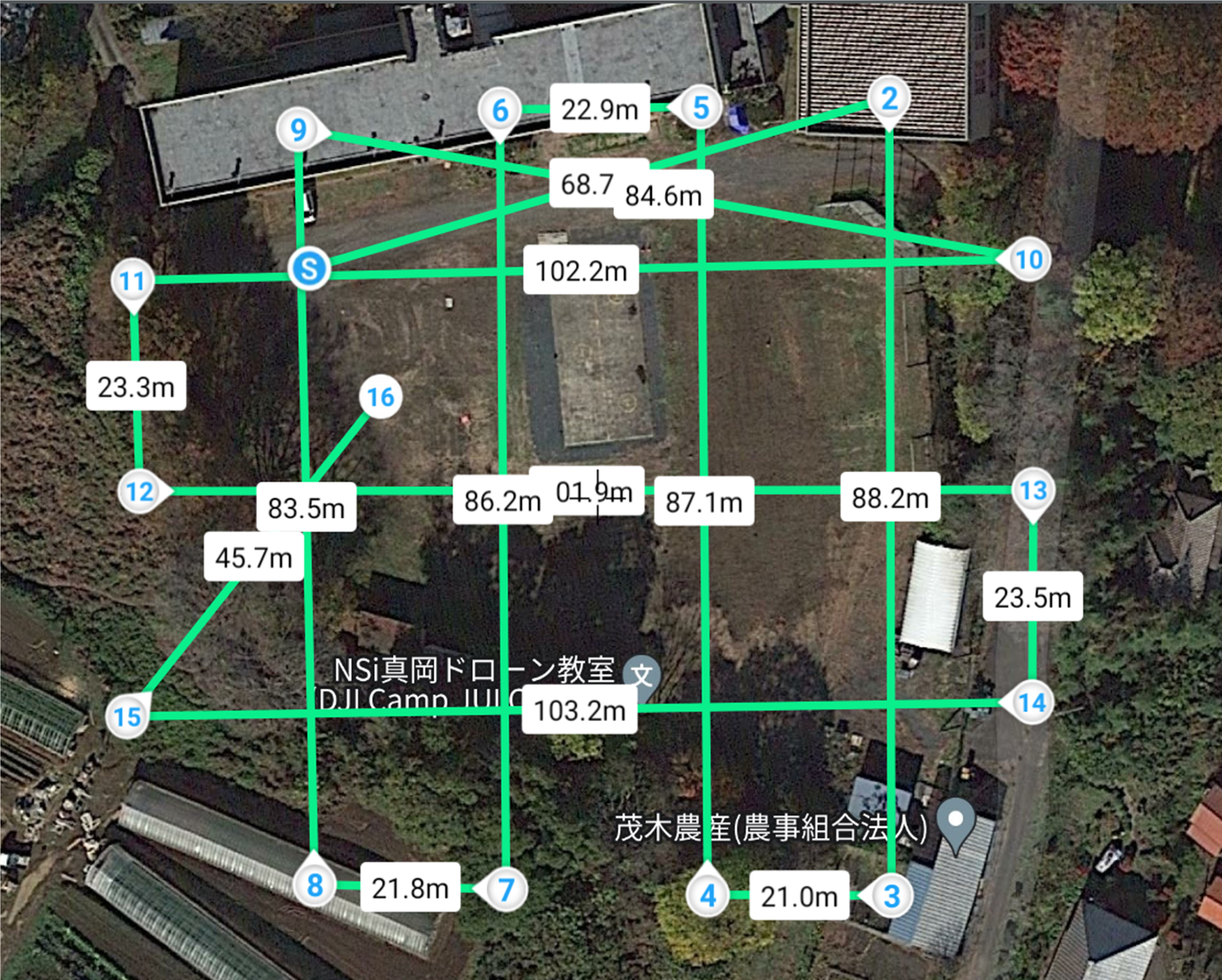
■検証結果
・取得点群
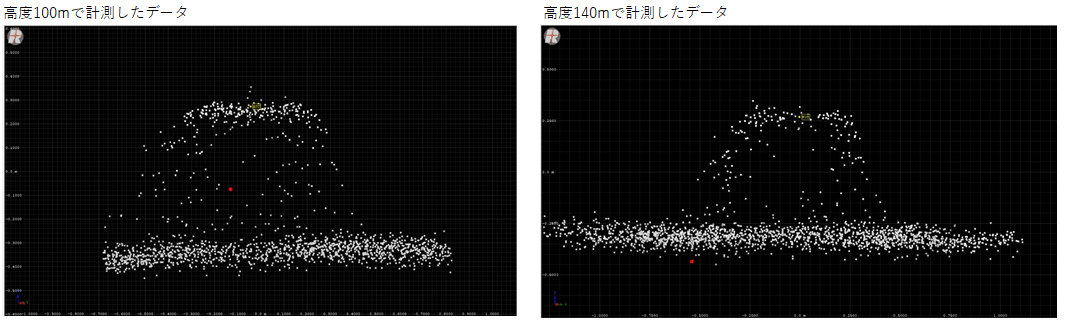
・点群のばらつき
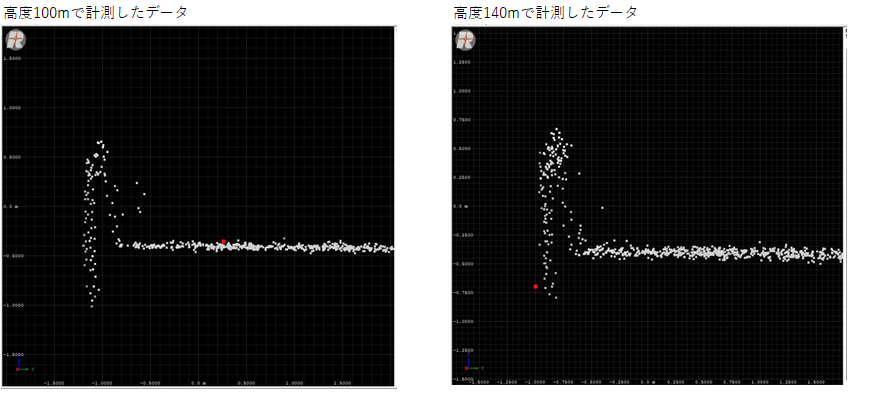
・検証点の断面
※参考 使用した対空標識の写真

・構造物の断面
・検証点精度(誤差のみ表記)
・飛行高度100m 検証①
点名
K1 ΔX : 0.0251400 ΔY : -0.0308723 ΔZ : -0.0245832
K2 ΔX : -0.0116270 ΔY : -0.0105163 ΔZ : -0.0244437
K3 ΔX : -0.0140048 ΔY : -0.0385272 ΔZ : -0.0086576
・飛行高度140m 検証②
点名
K1 ΔX : 0.0134900 ΔY : -0.0355300 ΔZ : -0.0349147
K2 ΔX : -0.0199331 ΔY : -0.0162549 ΔZ : -0.0193431
K3 ΔX : -0.0061818 ΔY : -0.0390707 ΔZ : -0.0100808
・飛行時間検証
・速度3m/s時 飛行時間①
バッテリー残量30%までの飛行時間 : 20分
・速度5m/s時 飛行時間②
バッテリー残量30%までの飛行時間 : 21分